William Yang
I am a robotics researcher working toward making our robots capable of reliably achieving highly dynamic motions. I am interested in the relevant factors when a robot makes high speed impacts with its environment and how to leverage that insight to develop better controllers. I've developed many controllers for the bipedal robot Cassie, particularly for highly dynamic motions such as running and jumping. Currently, I'm working on contact-rich dynamic manipulation.
I completed my PhD in Mechanical Engineering at the University of Pennsylvania working at the DAIR lab, where I was advised by Michael Posa and supported under the NSF Graduate Research Fellowship.\
I am currently at Amazon Robotics as an Applied Scientist working on optimization-based motion planning and control for bimanual robots.
More Bio Info Github G. Scholar LinkedIn
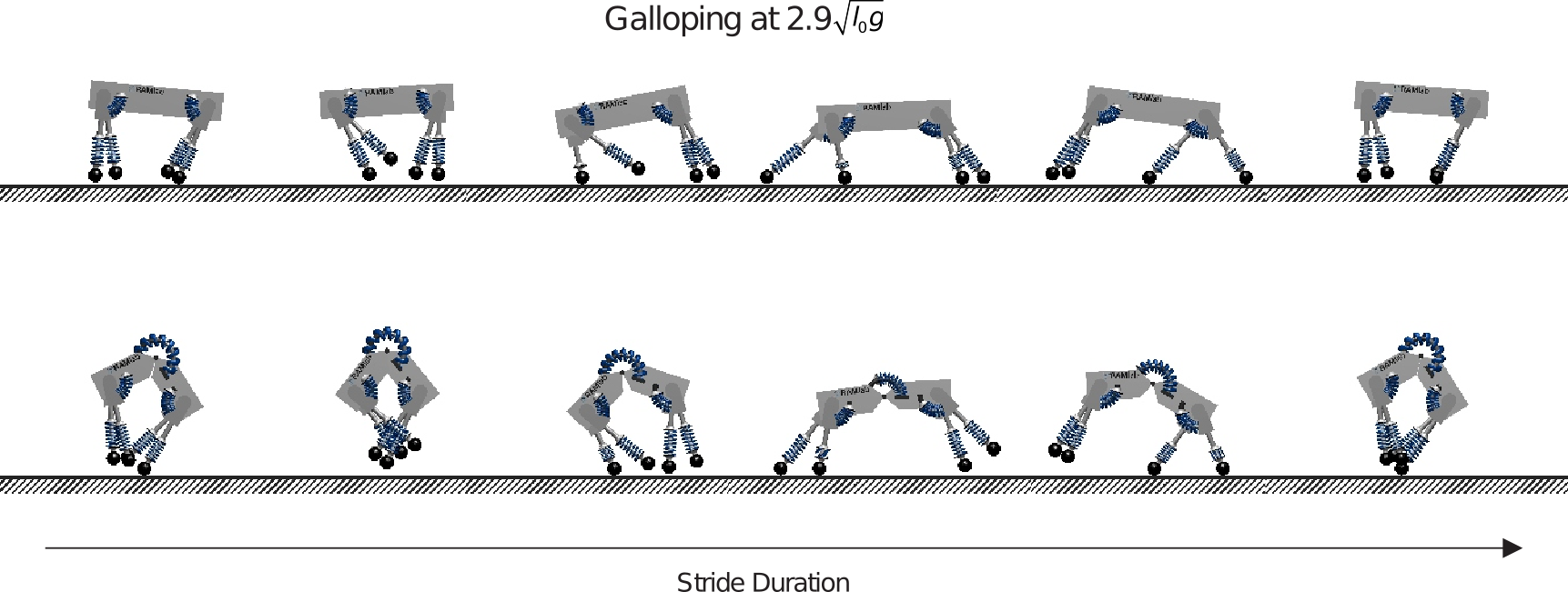
Spine morphology and energetics: how principles from nature apply to robotics
Yevgeniy Yesilevskiy, William Yang, and C. David Remy
Bioinspiration & Biomimetics 2018
Paper
2022
Impact-Invariant Running on the Cassie Bipedal Robot, Dynamic Walking 2022 - Madison, Wisconsin2022
Impact-Invariant Running on the Cassie Bipedal Robot, ICRA 2022, Legged Robots Workshop - Philadelphia, Pennsylvania2017
The Effect of Spine Morphology on the Motions and Energetics of Quadrupedal Robots, Dynamic Walking 2017 - Mariehamn, Finland2023
Applied Scientist II intern - Amazon Robotics: Cambridge, Massachusetts2019
NSF GRFP